Designer
Donn Koh
Designed by Donn Koh as an Honour's thesis, 2006. Currently in engineering development.
Designed by Donn Koh as an Honour's thesis, 2006. Currently in engineering development.
BraunPrize Grand Winner 2007
Red Dot Concept Award 2007
iF Concept Award 2008
Please do not reproduce in any form or post on blogs without the expressed written consent from Donn Koh.
iF Concept Award 2008
Please do not reproduce in any form or post on blogs without the expressed written consent from Donn Koh.
Sit-to-Stand Assistive Walker
for Cerebral Palsy
Industrial Design / Mechanical Concept Design

Rehabilitative needs of Cerebral Palsied kids are poorly met by existing walkers. Leapfrog walker invents an elegant mechanical solution for automatic transformation between sit & stand modes, thereby eliminating the need for frequent transfers in and out of the walker for short breaks.
This makes it is less tiring for caregivers - they can let the child practice more frequently! It also allows a more positive form of rehabilitation where the child can actively try to stand instead of being locked into corrective positions, imparting a sense of 'I can do it', achievement and self-esteem.
Lastly, it looks fun & approachable, helping the child with social inclusion rather than frightening other children away.
Leapfrog was honored with the 2007 Braunprize Grand Winner Award, 2008 IF Concept Award, 2007 Red Dot Concept Award. It is currently under development for engineering production by the National University of Singapore.
The Problems

Caregiver Burn Out = Insufficient Practice for Child at Home
Complex devices a hassle to set up
Tedious for caregivers, needing frequent repetitive transfers in/out of walker
Tired/busy parents - child often left idle

Poor Sense of Emotional Independence
Child is locked into positions by caregiver/device (sometimes necessary)
Lack of active-assisted systems that encourages child to make his own attempts to stand
Bad for self-esteem and for developing a sense of independence

Hinders Social Interaction & Integration
‘Living behind a cage’ effect
Frightening aesthetics that scare other children
Exaggeration of disability and awkward stares

Patients are Human, not Technical Problems
Assistive walkers for cerebral palsied children are often poorly designed - They are cumbersome to use, inconvenient for caregivers, and look ‘painful’. This is the result of viewing patients as mechanical puzzles in need of repair, and forgetting that they are people with feelings.
Leapfrog was designed to create a new system of gait-training support that is intuitive to use and easier to integrate into the life of the child and his family. It would be good if Leapfrog also had an appeal that would attract unimpaired children to come and play together instead of frightening them away.
Leapfrog was designed to create a new system of gait-training support that is intuitive to use and easier to integrate into the life of the child and his family. It would be good if Leapfrog also had an appeal that would attract unimpaired children to come and play together instead of frightening them away.

Elegant Mechanics
An Automatic and Intuitive Gas-Spring Transformation System

Benefit #1: Transformation without Caregiver Intervention
Leapfrog automatically transforms according to the child’s intention to sit, stand and walk - relieving parents from the chore of repeatedly transfering the child between resting stool and walker. Less weary caregivers = more frequent practice for the child.
Benefit #2: Sense of Independence & Self-Esteem Development
Automatic lift assistance - initiated by the child and not requiring caregiver intervention - affords a more positive form of rehabilitation where the child gets to ‘try to do it himself ’ instead of being forced into positions.

How Automatic, Intuitive Transformation Works
When sitting, the child’s weight folds the walker into chair mode; When trying to stand, reduced pressure on the seat allows the gas spring to extend, transforming into walker mode.
How Lift Support Works
The gas spring raises the seating surface, and is calibrated to provides the right amount of lift to assist the child’s bottom past the critical mid-point of standing. This force is reduced as the child develops greater control and strength.

Flexibility: Complex Problems with Simple Solutions
It was a major challenge to simultaneously incorporate size adjustments, flat folding and transformation. Eventually an elegant solution was found, accomodating growth for 11/2 - 5 year-old children.
Leapfrog Development Process Case Study
Gathering Information & Insight
Making Sense of the Chaos
Developing Key Strategies
Ideation & Concept Development
Models, Prototypes & User Testing
Gathering Information & Insight

Literature, Field Observation & Hands-on Research
Gathering insights in this specialized field of medical practice required going deep into literature, studying existing devices, interacting with patients, and consulting with therapy and equipment specialists. Most of the useful observations came from hands on participation in rehab sessions.
Making Sense of the Chaos

Investigation Tools
Various tools were used in the process to organize research findings into usable information. Here, a user-centric map was used to record the observations, gain a holistic view of the problem, and to identify related factors. This helps to ensure more bases are covered and key opportunities are not missed. The map here helped to identify that beyond the patient’s obvious physical needs, his emotional needs and the secondary user (caregiver) are also crucial factors to consider for the design.
Developing Key Strategies for Leapfrog
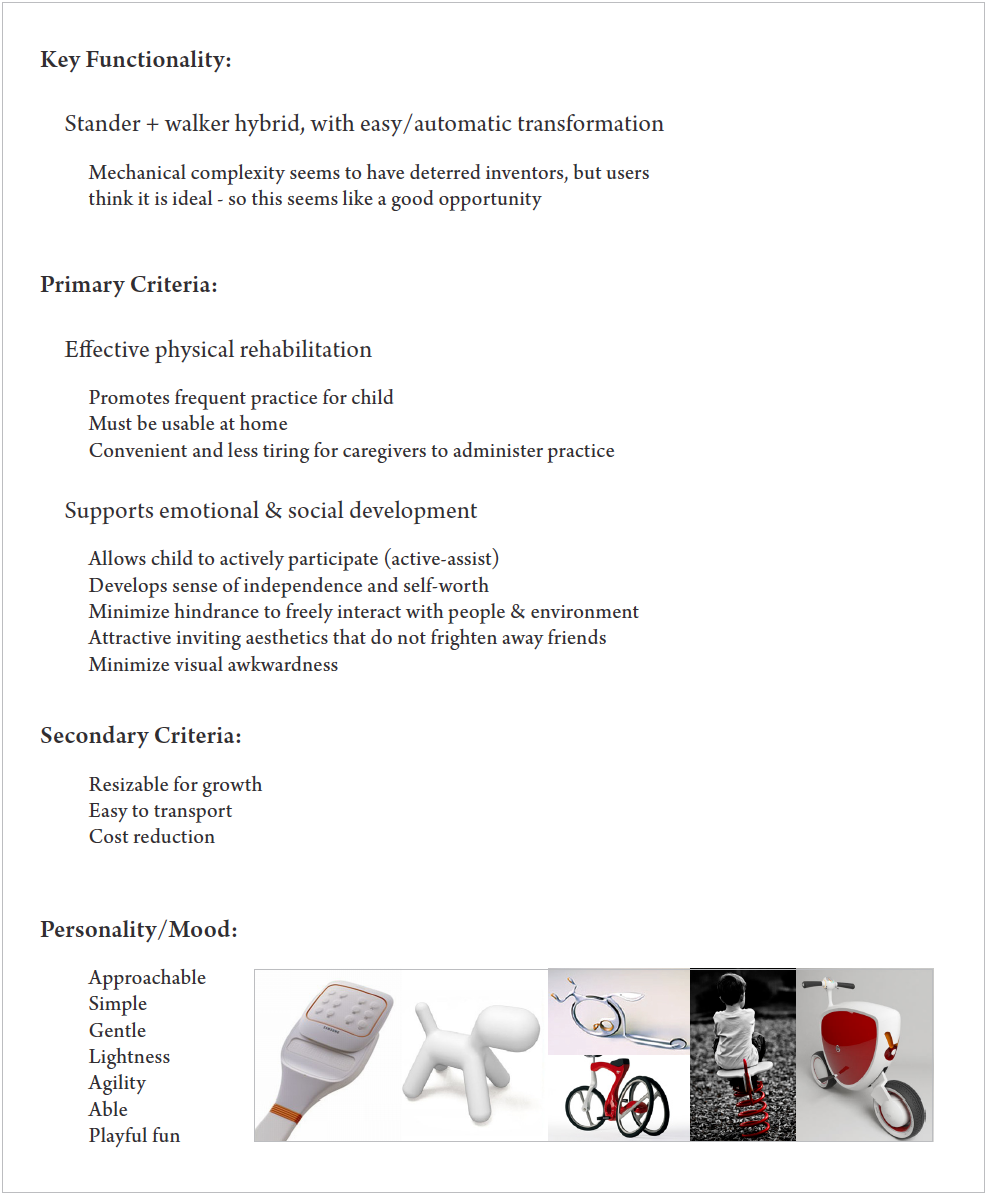
Strategy 1: The Importance of Emotional Needs
New findings in physical therapy emphasize the importance of developing the patient’s sense of independence and confidence. Active assistance, where the child is encouraged to ‘try-it-himself’ while being partially supported, is preferred. Conventional equipment approach the child’s condition like a mechanical problem that needs to be fixed, these devices lock them into passive positions, leaving no room for a sense of participation and achievement.
I find myself agreeing with the new approach because it grows the child as a whole person, so this became a key factor in my brief - to support the user’s positive emotional development alongside physical rehabilitation. In the same vein, I added another criteria - I wanted the walker to be of minimal hindrance to communication and interaction with friends and family.
I find myself agreeing with the new approach because it grows the child as a whole person, so this became a key factor in my brief - to support the user’s positive emotional development alongside physical rehabilitation. In the same vein, I added another criteria - I wanted the walker to be of minimal hindrance to communication and interaction with friends and family.

Strategy 2: The Importance of Secondary Users/Caregivers
Speaking to the parents yielded the most useful information for areas which sorely needed improvement. It became obvious that the ease of use for the caregivers profoundly impacts the frequency of practice for the child. Lower caregiver involvement, easy adjustment and setup, and lightness thus became important factors of the design brief.

Unmet Needs, Opportunity & Positioning Study
The research was further fleshed-out with an in-depth study of existing products on the market - analysing their price, positioning and functionality. ‘Intensive rehabilitation’ type devices seemed plentiful, whereas a device which is more companion-like, with a friendliness and convenience geared towards daily usage at home, appears be more of an unmet need.
This resonated with the earlier insights calling for a product that is more like an assistive companion than a medical tool, and one that is designed with sensitivity to the emotional development of the child.
In terms of functionality, it became clear that a combination stander with gait-trainer device could be a good niche to pursue because there were relatively fewer offerings - most of which did not seem to be very competitive.
This resonated with the earlier insights calling for a product that is more like an assistive companion than a medical tool, and one that is designed with sensitivity to the emotional development of the child.
In terms of functionality, it became clear that a combination stander with gait-trainer device could be a good niche to pursue because there were relatively fewer offerings - most of which did not seem to be very competitive.
Creating the Detailed Brief
The insights and analyses provided the basis to draw up the detailed design brief to guide the development process. This included a few primary aims and secondary criteria, as well as the definition for the appropriate product personality/mood.
Ideation & Concept Development
Early Sketches
Initial ideas were kept broad, exploring different ways to look at the problem. From baby-walker-esque ideas to exoskeletons to hand-powered go-karts.

The kart idea showcases a different take on the problem - Although it only caters for standing up (no gait-training feature), it addresses issues of motivation and community interaction through games, while still providing limb-strength training. I believe in an ideation process which starts with broad options because new ways of looking at the problem opens up possibilities to find interesting solutions that might otherwise have been missed by tackling the problem head-on.
Concept Sketches
Promising ideas were developed further into 3 concept directions: The proposals were fleshed out with more realistic ergonomic, usage scenarios, construction layout and preliminary visual language.

This was the chosen concept direction for Leapfrog
Attempting Sportiness to Counteract Impression of Disability
The selected concept was taken further and exploration was broadened again. I tried a more sporty style to escape the notion of disability. The structures were also thinned down from the early concept to reduce the cage-like feeling. However it still had a ‘technical/engineering’ aesthetic, and lifting the child from the underarms instead of the backside was not ideal.

Sketches and quick CAD mock-ups to test concept

The Search for a Language and a Gesture
While trying to solve the mechanical requirements, I was looking for the appropriate first-read impression, and the overall visual personality of the walker. These sketches started to define the proportional balance, stance, and design language of Leapfrog.

Key Mechanical Development
I figured out a way to eliminate the bottom structural beam. The walker lost its technical aesthetic, and became less cage-like. It looked a lot of lighter and more agile. This also enabled an elegant folding solution. I decided that this was good.
Models, Prototypes & User Testing
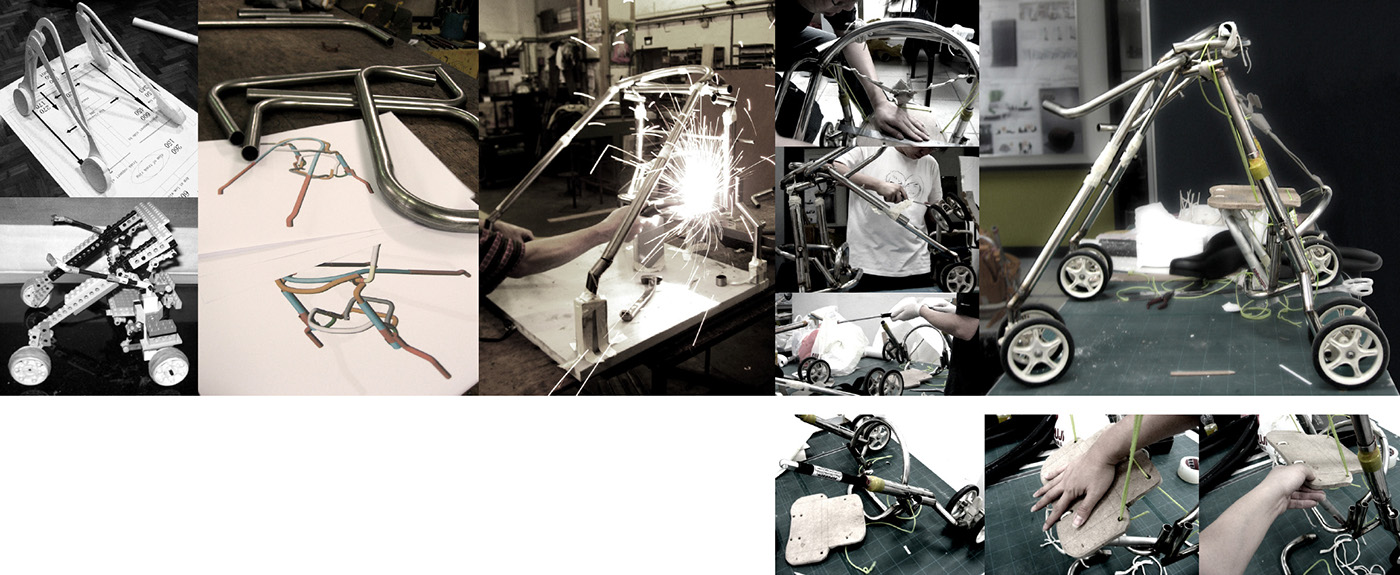
Rough Models & Mechanical Prototype
Foam, LEGO and structural CAD models were first used to quickly experiment with and verify ergonomics, mechanism layout, folding and growth allowances. After that, plans were drafted to build the functional testing rig.

Early Testing & Prototype Modification
The problem quickly became obvious - the seat did not fold as envisioned on sketches, and the walker was therefore unable to transform. It required entirely rethinking the way the seat compresses, and many rounds of prototype modification to finally get it to work - and for the mechanical principle to be refined to a good level of simplicity and clarity.


The resultant simple and intuitive sit-to-stand transformation, and convenient single-action folding principle
Proof of Concept
User-testing was carried out with the help of a paraplegic child volunteer at the Singapore Cerebral Palsy Centre. The comparative study of the fluidity of the standing up process, between Leapfrog and the paraplegic child’s own set of crutches, reveals Leapfrog’s smoother and more effortless system, it also proved itself as an adequate walking support. At this stage, Leapfrog was awarded Grand Winner of the prestigious Braunprize in Germany, 2007. The research is on-going to further improve the system and is currently funded by the National University of Singapore for further engineering development towards production.

With crutches, there was a need to initiate standing by forcefully swinging his body forward to gain momentum. There was also a tendency for the child to repeatedly fall back onto the chair during mid-stand; With Leapfrog, such ‘fall back’ cases did not occur, and the automatic transformation/standing function was significantly gentler, smoother and faster.
Aesthetics & Detailing
The prototype testing led to further modifications in the structural design and proportions. These changes were made concurrently with the final aesthetics refinement and visualized in CAD. Cosmetic mockups were subsequently made via stereolithography.


